Method
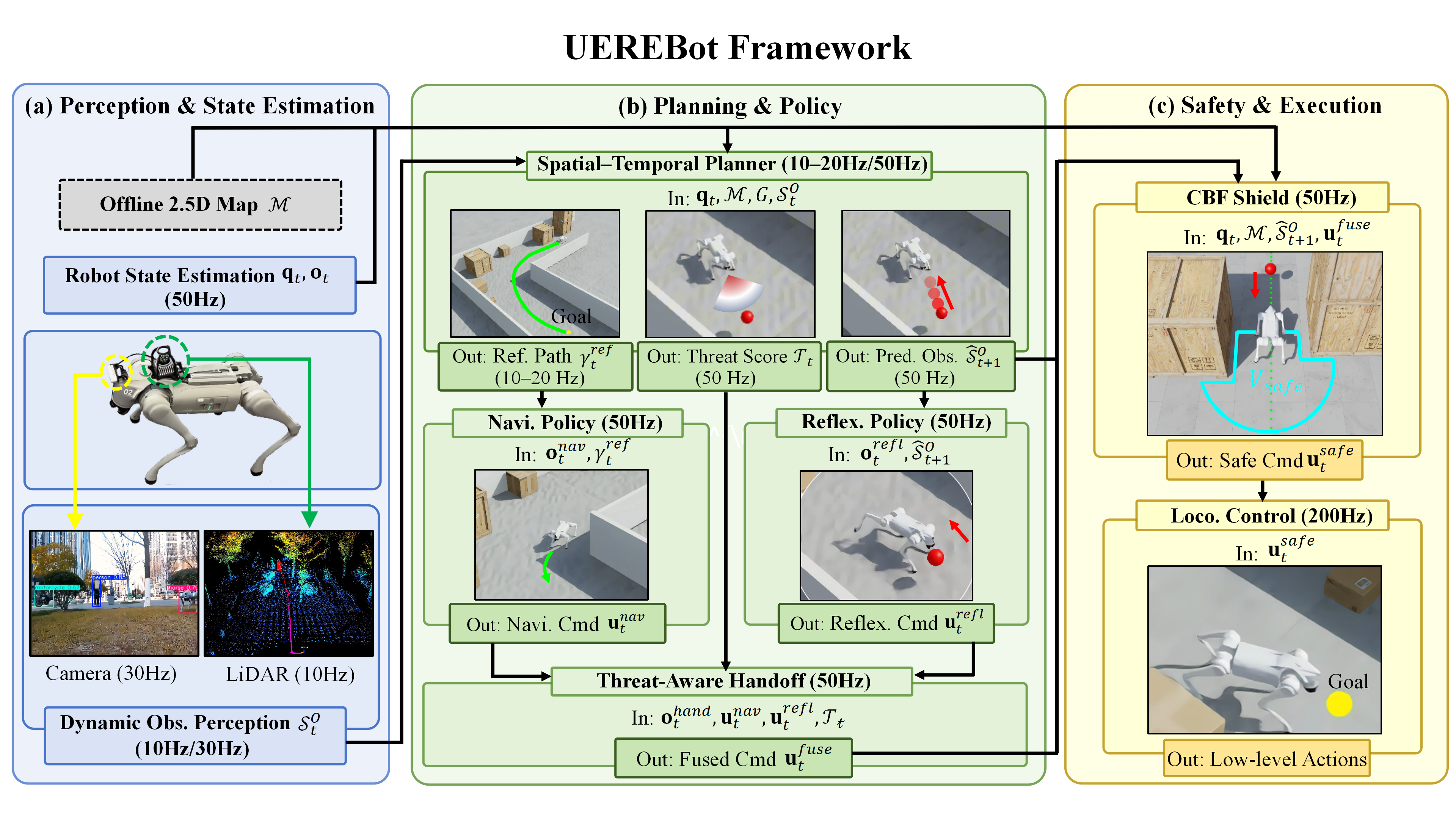
Safe quadrupedal navigation in unstructured environments requires long-horizon goal progress, passability over uneven terrain and static obstacles, and collision avoidance against high-speed dynamic obstacles under limited reaction time. Planning-based decisions can be too slow, while purely reactive decisions can sacrifice goal progress and passability. To resolve this conflict, we propose UEREBot (Unstructured-Environment Reflexive Evasion Robot), a hierarchical framework that separates slow planning from instantaneous reflexive evasion and coordinates them during execution. UEREBot adopts a spatial--temporal planner that provides reference guidance toward the goal, obstacle predictions, and threat signals. It then uses a threat-aware handoff to fuse navigation and reflex commands, and a control barrier function shield as a final command filter. We evaluate UEREBot in Isaac Lab simulation and deploy it on a Unitree Go2 quadruped equipped with onboard perception. Across diverse environments with complex static structure and high-speed dynamic obstacles, UEREBot achieves higher avoidance success than representative baselines while maintaining goal progress, demonstrating improved safety--progress trade-offs.